はじめに
このたび、サイトロンジャパンのスタッフの皆様から、星沼会あてにリレーレビューのご依頼をいただきました。昨年販売された屈折望遠鏡SJH-75UFを我々でリレーして、自由にレビューしちゃってください、とのことなのです。
「え、いいんですか?まじで」
って顧問も一枚加わらせていただき、先日蔵王で作例を撮影してきました。
そんなわけでばっちりレビューしますので、どうぞよろしくお願いします
まず、SJH-75UFとは?
口径75mm、焦点距離375mm(F5)の屈折アストログラフです。現時点*1で、10cm以下の屈折として世界最高峰の光学設計であると断言できます。その詳細は、サイトロンジャパンの特設サイトでとても分かりやすくまとめられています。
一番の特徴は、その星像の鋭さです。SJH-75UFのスポットダイアグラム半径は、中心で0.67μm、フルサイズ周辺で1.31μmと、レイリー限界をはるかに下回るムチャクチャな設計値です。スポットダイアグラムは、小さければ小さいほど細かな構造を写し出す分解能が高いことを意味します。顧問の見立てでは、国内外で販売されている10cmクラスの高性能屈折鏡筒に匹敵する分解能を持つだろうと考えています。
こまかな註:レイリー限界やシーイングの影響にかかわらず、スポットダイアグラムは小さければ小さいほど、撮影結果の分解能は高くなります。そのあたりの理屈は以前の記事
星像のサイズを計算してみよう! SJH-75UFを例に深掘りする分解能の話 - 天文はかせ幕下
でまとめていますので、ご興味あればご覧ください。
今回のレビューで、顧問が注目すること
今回のレビューでは
- 撮影現場での使用感
- 撮影結果の評価と画像処理後の仕上がり
の2点をメインに扱おうと思います。鏡筒の機械的・機構的なな面についてはあまり触れていません。そこは、自分よりも星沼会のほかのメンバーが得意とするところですので、彼らに任せようと思います。
撮影の現場で使ってみて
設営
撮影は、宮城県蔵王連峰の賽の河原駐車場で行いました。標高1250m、撮影日の7月17日は、気温20℃~23℃ほどでした。

組み合わせた赤道儀はCEM70Gです。2.5kgのウエイトをシャフトの真ん中につけてバランスが取れました。カメラはAPS-CセンサーのASI2600MMとMCで撮影を行いました*2。
設営時に戸惑った点がありました。次の写真は赤道儀に取り付けた鏡筒を横から見ています

この状態で、ピントノブが赤道儀の台座に接触してしまい回すことができないのです。CEM70Gのアリミゾはロスマンディとビクセンのデュアルになっていて、ビクセンアリミゾが深めなことと、台座自体が大き目なのでこういうことが起ってしまうようでした。
当夜、誰も居ない駐車場でひとり頭を抱えました。しかし冷静になれば解決は簡単で↓。筒をバンドの中で回してピントノブを上側にすればよいだけです*3

ちなみに、たとえばEQ6R赤道儀なら台座は小さく、フォーカサーを取り付けた状態でもピントノブが干渉することはありませんでした。

ピント合わせ
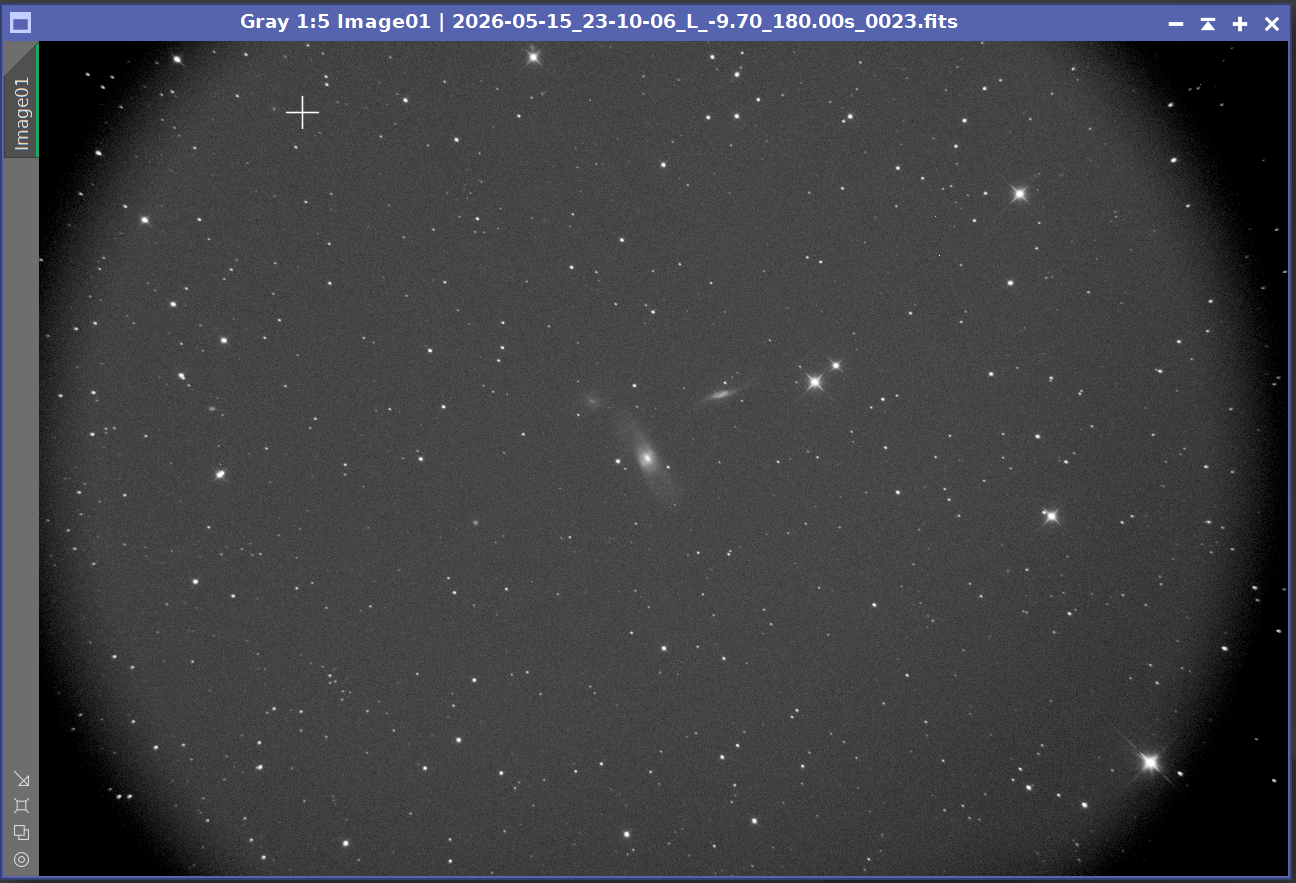
ピント合わせはバーティノフマスクをつかってマニュアルで行いました。下はデネブを中心に入れてピントを合わせて撮影した画像です。

中心と周辺部を並べてみても、どちらも同じ回折像になっていました(下)。スケアリングも問題無いようです。

さらに下は10秒露光での中心と最周辺の128px切り出しです。この点も問題なく中心から周辺まで点像でした

また、当夜は薄明後の気温が23℃、明け方は20℃ほどでした。その範囲で撮影中のピントのずれは確認できませんでした。そもそも、当日の下界の最高気温は35℃でした。そこから山の上に鏡筒を運び上げてきてわけですが、設置した時には鏡筒の温度変化はすでに落ち着いていたようで、順応にはそれほど気を使う必要を感じませんでした。
回転装置を回してもピントはズレない
顧問は、カメラの縦と横を間違えることが良くあります。ピントを合わせてから対象を導入して一枚目の撮影結果を確認すると、
「あれ、なんか違うな」
って。この日の撮影でもやっちゃってました。
SJH-75UFには回転装置がついています。それをヌルっと90°回して、念のためにもう一度デネブを導入してピントを確認したところ、中心から周辺にかけて、バーティノフマスクの回折像に変化は見られず。
一晩で多くの対象を撮影する場合も、あまりシビアに考えずに回転装置をクルクル回して大丈夫なんじゃないかなと思います。
ガイド
撮影時は、つねに3~5m/sの西風のあるコンディションでした。もし、鏡筒がRASA11だったらガイドはほぼ無理なコンディションです。
今回は、ガイドが2~3秒角程度に収まって優秀な結果でした。鏡筒がコンパクトで風に強いのは、取れ高の面でも大きなメリットだと思います(このコンパクトさで10cmクラスの屈折に匹敵する分解能を有しているのは大きいです)
撮影結果(NGC6888を例に)
対象は、NGC6888クレセント星雲の周辺を選びました。
- 密集する天の川の微光星を中心から周辺まで、いかに描出できるか?
- クレセント星雲本体が持つ微細な構造を、どれほど分解できるか?
などがポイントになる、高性能屈折鏡筒を試すのに格好の領域だと考えました。
画像処理した最終的な仕上げ画像は最後に披露いたします(とても納得のいく作品が仕上げられました)。
まずはスタック直後のRGB画像をみて行きます
スタック直後のRGB画像
RGB画像は、ASI2600MCのフィルター無し、180秒露光x42枚=2時間6分露光の結果です。スタック直後、背景をニュートラルにカラーバランス調整し、STFのオートストレッチを掛けただけの画像を次に示します。もちろんBXTは適用してません。

ピクセル等倍の高解像度画像はコチラからご覧いただけます。
中心と周辺の256ピクセル切り出しはこんな結果でした(下)

微光星はアンダーサンプリング
SJH-75UFの中心部のスポットダイアグラムは0.67μmで、エアリーディスクとシーイングを加味するとおよそ5.6μmと見積もることができます*4。ASI2600MCのピクセルサイズは3.76μmでしたから、カメラセンサーによる星のサンプリングは、だいたい下の図のような感じになります:

太い四角が1ピクセルの大きさで、その中にRGGBのベイヤー配列があるわけですからかなりのアンダーサンプリングが予想できます。つまり、星像の小ささにセンサーのピッチが追い付いていない状態です。
実際に中心部の星像を強拡大して見てみましょう

星の四隅にでている偽色が、撮影がアンダーサンプリングになっていることを表しています。
鏡筒の性能をさらに引き出すためには、さらに小さなピクセルサイズのカメラを選ぶか、Drizzle Integrationがオススメとなります。実際のところ、現状のカメラをさらに下回る小さいピクセルピッチはあまり現実的でないと思われ、Drizzleを行うのが妥当だと考えます。
Drizzle2倍の効果
下の画像は、Drizzleなしの通常の画像と、スタック時に2倍のDrizzleを行った結果の比較です。Drizzleを行うと星像のカクカクが無くなって自然な円形になるだけでなく、偽色も緩和されています。

拡大しないと分からない小さな差ではありますが、星を小さくする処理などを行い結果をさらにシャープに見せたいような場合には、両者に差がでてくると思います。
最終画像はコチラです!

date:20260720
location: saino-kawara, Zao mountain range
optics: Sightron SJH75UF(f=375mm F5)
camera: ASI2600MM/MC
Exposure: total 5.45h
- 180s x 42f 2600MC, no filter
- 180s x 36f 2600MC, L-extreme
- 180s x 31f 2600MM, L-extreme
Processing: x2 Drizzle, PixInsight, Photoshop
キャプションに書いたように、ノーフィルターで撮影したRGB画像に加えて、L-Extremeフィルターを使って撮影した結果をブレンドしています。クレセント星雲本体のO3のベールや、周辺の淡いHαの構造を引き出すためです。鏡筒のレビューですので、もちろんBXTは使っていません。ただしAIのノイズ処理と、2倍のDrizzleは行っています。総露光時間は5時間半です。
気になる領域を拡大して見てみましょう。以下では、APS-C換算でf=1500mm程度の拡大をしてみます:
(1)まずはクレセント星雲本体です。O3の淡いガスに透けて細かな構造をもつHαの星雲が良く写っていると思います。

(2)画像下端に分布している暗黒帯。この辺りは星雲の色の変化が豊富で美しいです

(3)例のバブルもごくうっすらと写っていました(中心にうっすら丸い構造が見えています)

(番外編)Drizzle2倍+BXTでブースト
さて、ここまではSJH-75UFの素の性能を見るために、BXTを使わずに処理した結果を見てきました。もしBXTをしたらどうなるのかは気になると思います。
顧問のこれまでの経験では、特にアンダーサンプリングに取得されたデータにはDrizzleとBXTがとても良く効きます。
以下は、L-Extremeフィルターをつけて撮影したモノクロ画像について、スタック直後の元画像と、x2のDrizzle+BXTの処理をした画像について、BXTのあり・なしを比較したものです。NGC6888の一部を拡大した画角でgifアニメにしました。

Drizzle+BXTはかなりの効果と思います。
まとめです!
SJH-75UFを、撮影から画像処理まで通して使ってみました。10cm高性能屈折クラスの分解能と表現力を、手軽にフィールドへ持ち出せる究極のコンパクト・アストログラフとして、とても優秀だと思いました。
明るさについて、F5は決して明るいとは言えません。ただ、一晩で可能な露光時間(今回は5時間半でした)の範囲でも、最近の画像処理技術(AIによるノイズ処理を含む)とフィルターワークを用いれば、淡い領域を十分に描写することが出来ました。今回の作例をご覧いただければ、それがわかると思います。
ポイントをまとめると以下の通りです。
-
極めて鋭い星像と高分解能: 口径75mm とは思えないシャープさがあり、微光星や星雲の細かな構造を詳細に描写できました
-
風に強く、取り回しが良い: 鏡筒自体がとてもコンパクトなため、今回のような風のあるコンディションでもガイドが安定していました。遠征撮影での安心感は抜群で、車の中で熟睡できます
-
デジタル処理(Drizzle + BXT)との相性がGood!: 星像が極めてシャープでアンダーサンプリング気味になるからこそ、2倍DrizzleやBXTを適用した際の解像感の伸びしろが大きいです。焦点距離で換算1000mmくらいのクロップにも十分耐えると思います。
今回はAPS-Cセンサー(ASI2600MM/MC)での検証でした。フルサイズではどうなのか?そちらの検証は、星沼会メンバーのAramisさんやそーなのかーさんのレビューにバトンタッチしたいと思います。ぜひそちらも楽しみにしていてください。
最後に、素晴らしい鏡筒をお貸し出しいただき、レビューの機会をくださったサイトロンジャパンの皆様に感謝いたします。ありがとうございました!